LogiQuad
Wie intelligente Systeme die Bestandsführung flexibler machen können

Worum geht es?
- mobile Robotik
- Inventur
- Reinforcement Learning
- Computer Vision
- weitere Probleme und Lösungen
Das Problem: Inventur
Was wäre, wenn…
Was wäre, wenn…

…was braucht man dafür?
Ein mobiler Roboter
- läuft autonom durchs Lager
- erkennt Objekte und deren Lage
- vergleicht mit dem ERP-System
- erstellt automatisch Berichte
Warum vier Beine statt Räder?
- Treppen und Schwellen
- Enge Gänge und Hindernisse
Reinforcement Learning
- operante Konditionierung
- "Programmiertes Lernen"
- "Reinforcement Learning"
- Gute Aktion → Belohnung
- Schlechte Aktion → Strafe
Reinforcement Learning

mit State \(S_t\), Action \(A_t\) und Reward \(R_t\),
sodass \[S_0, A_0, R_1, S_1, A_1, R_2, S_2, A_2, R_3, ..., R_T\]
Laufen lernen - in der Simulation
Start des Trainings
gelerntes Stehen
gelernte Laufstile
Laufen lernen – in der Simulation…
… bis zur komplexen Bewegungssteuerung
Digitaler Zwilling
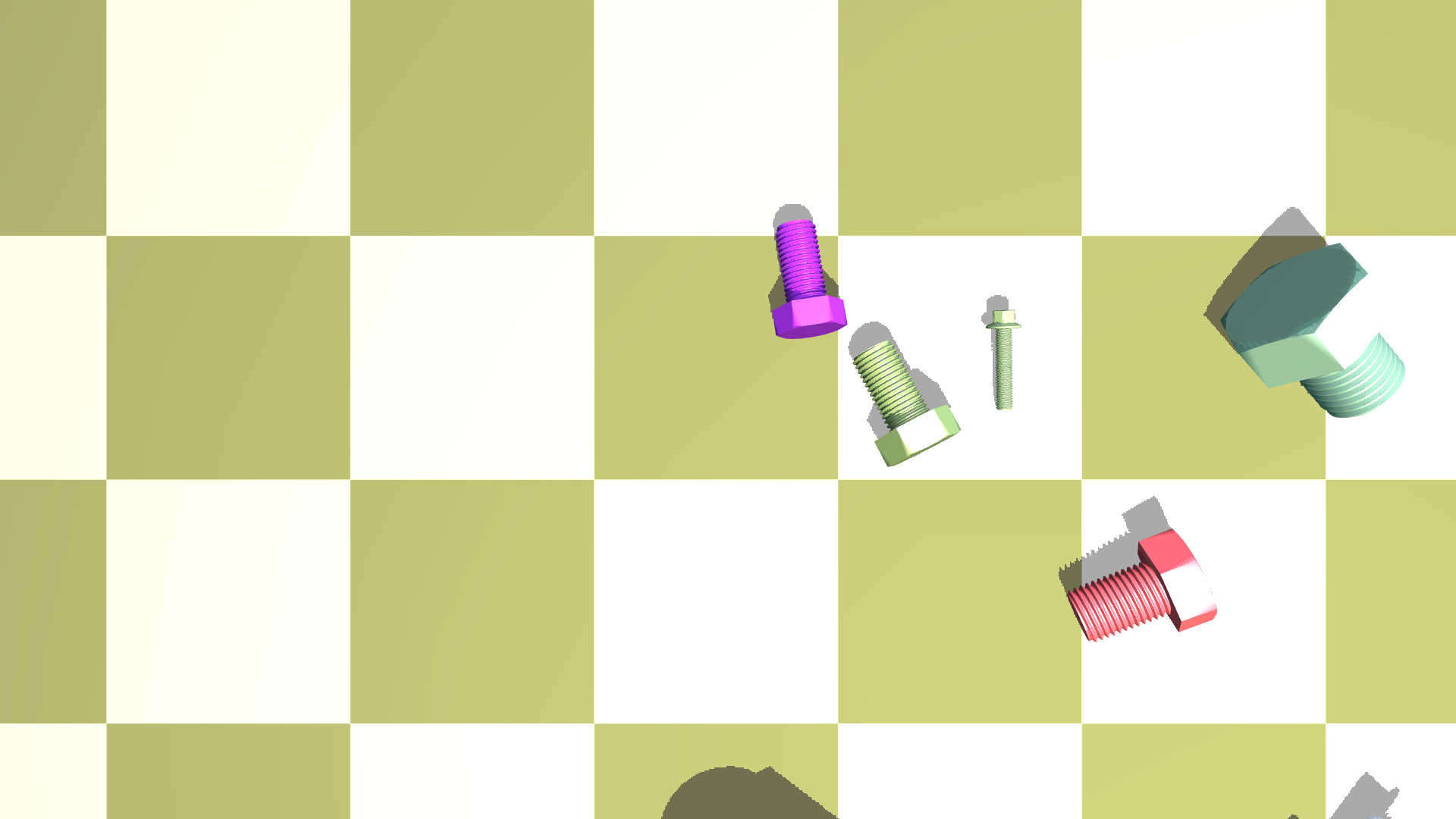
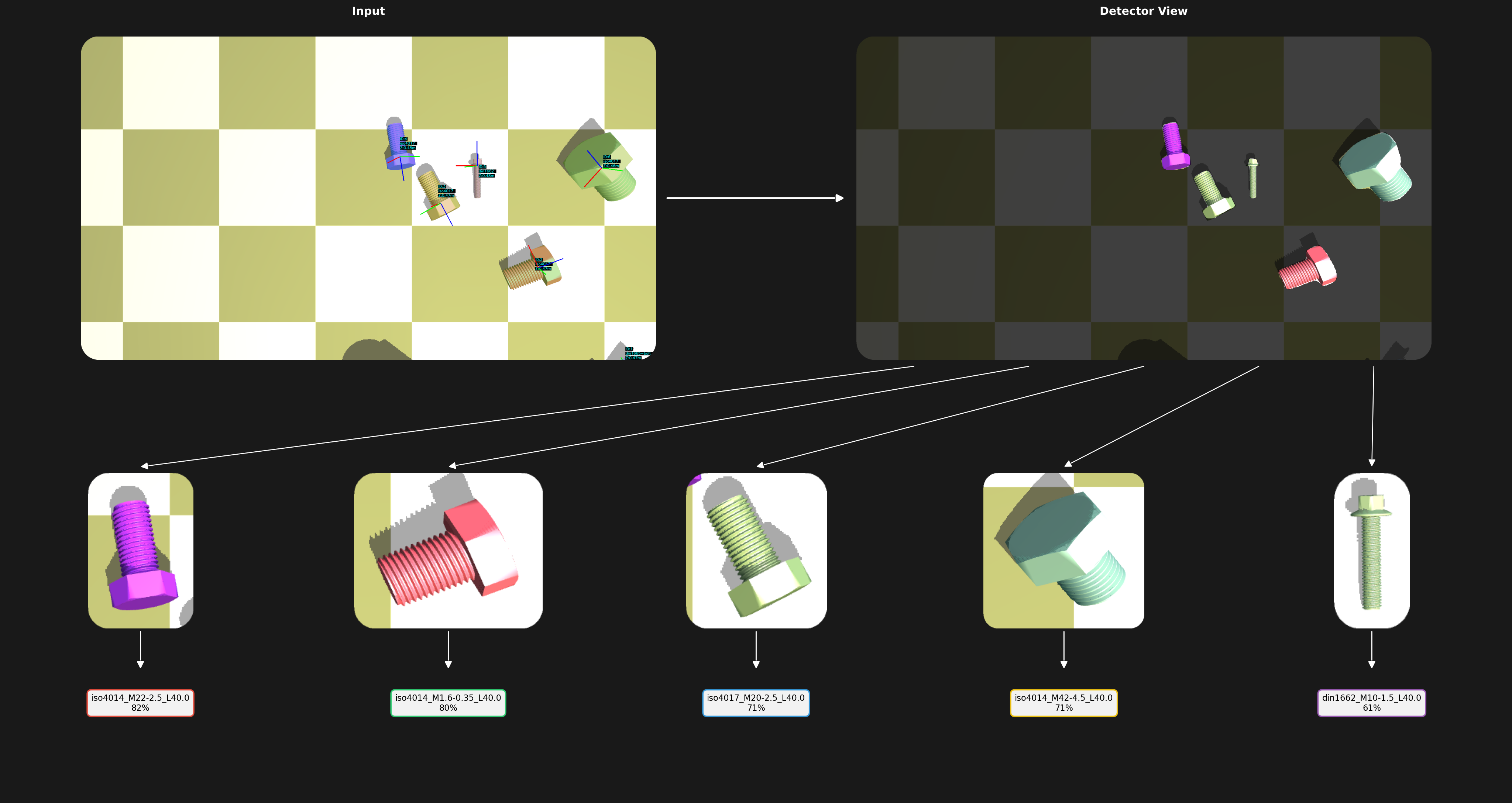
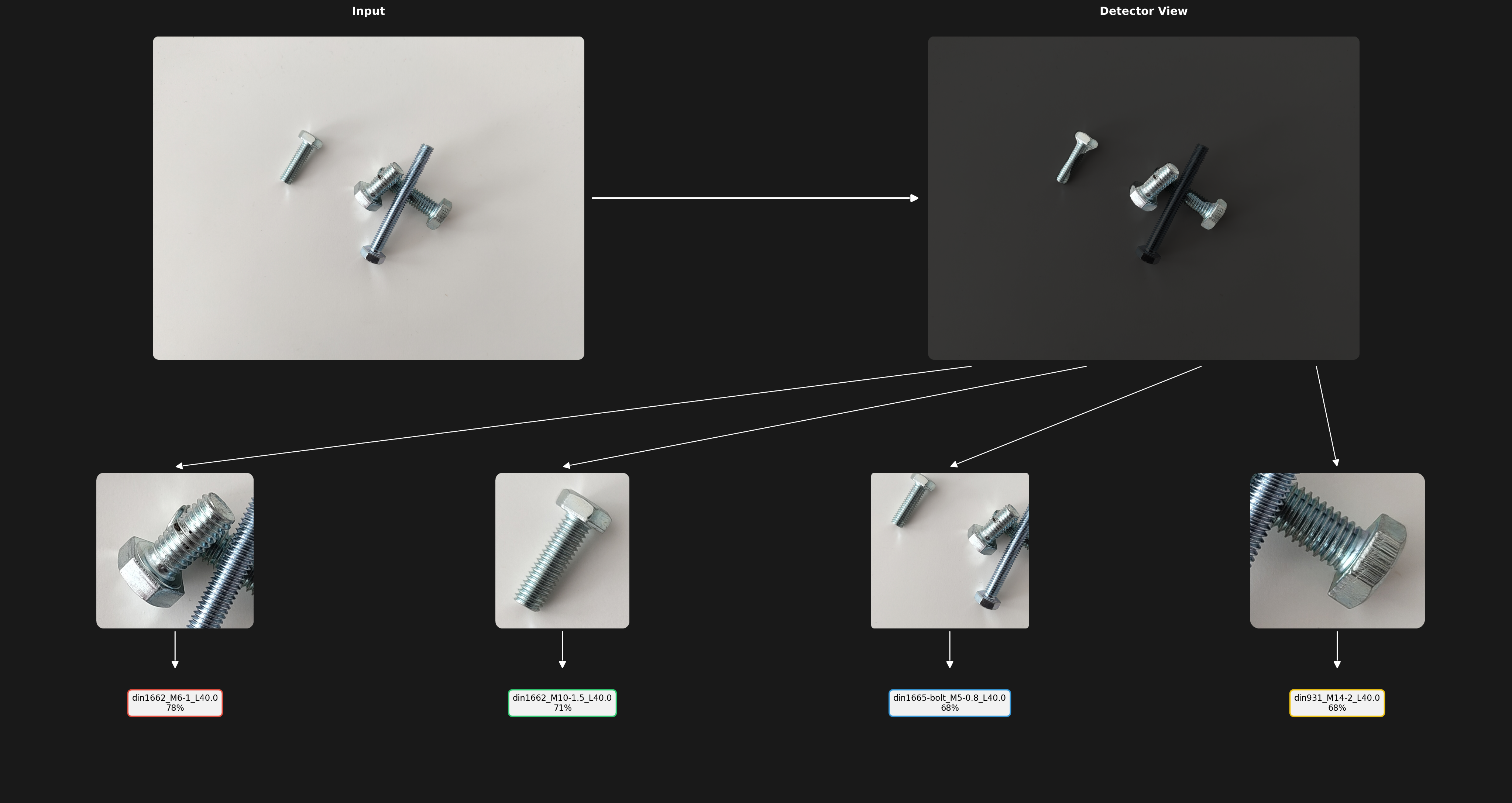
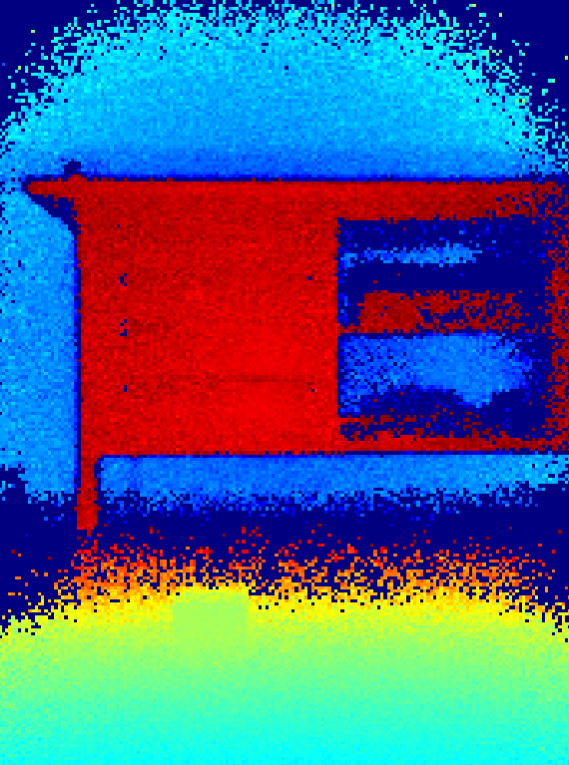
Computer Vision
Was man nicht will
Besser wäre
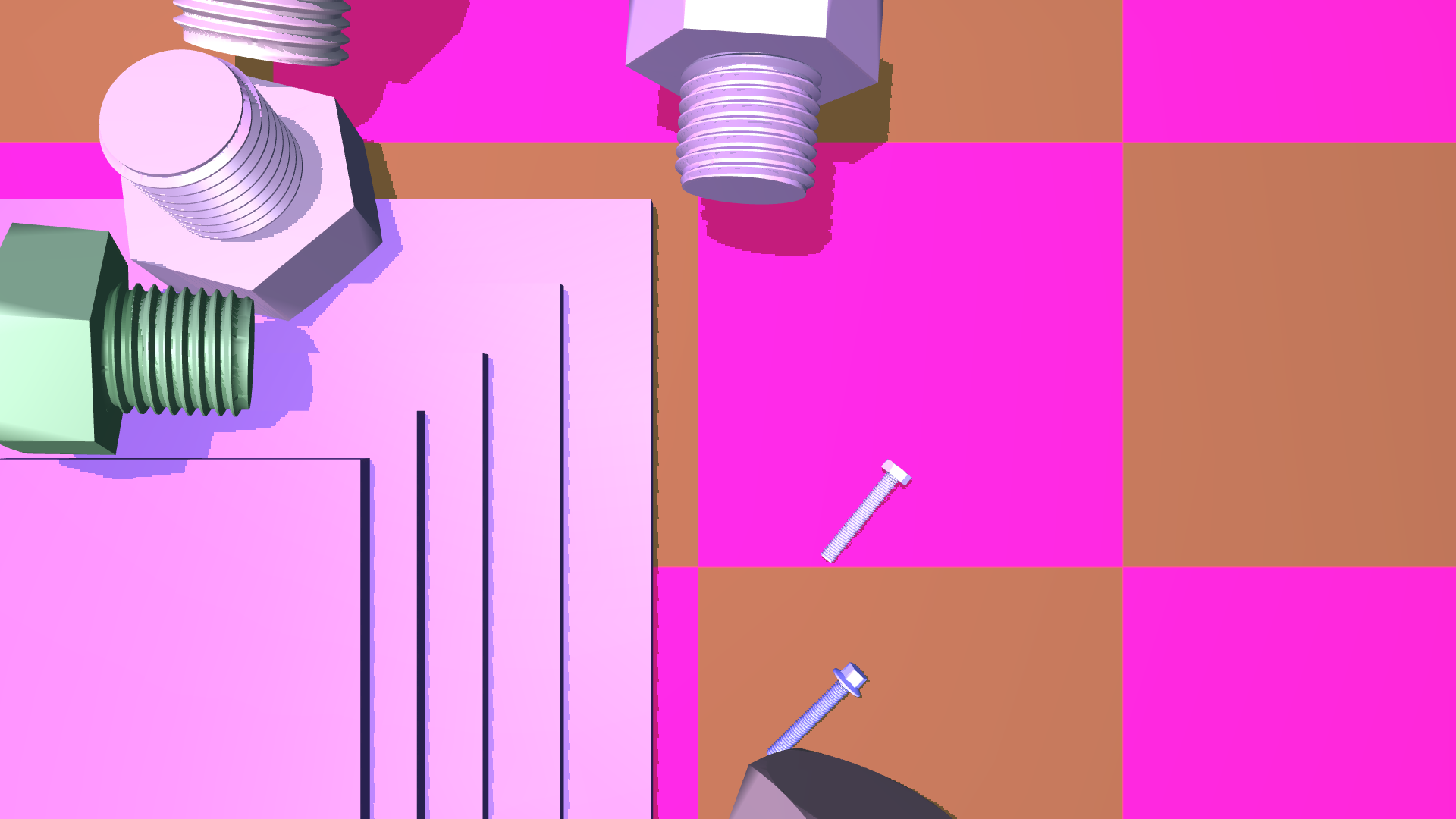
Daten aus dem Simulator
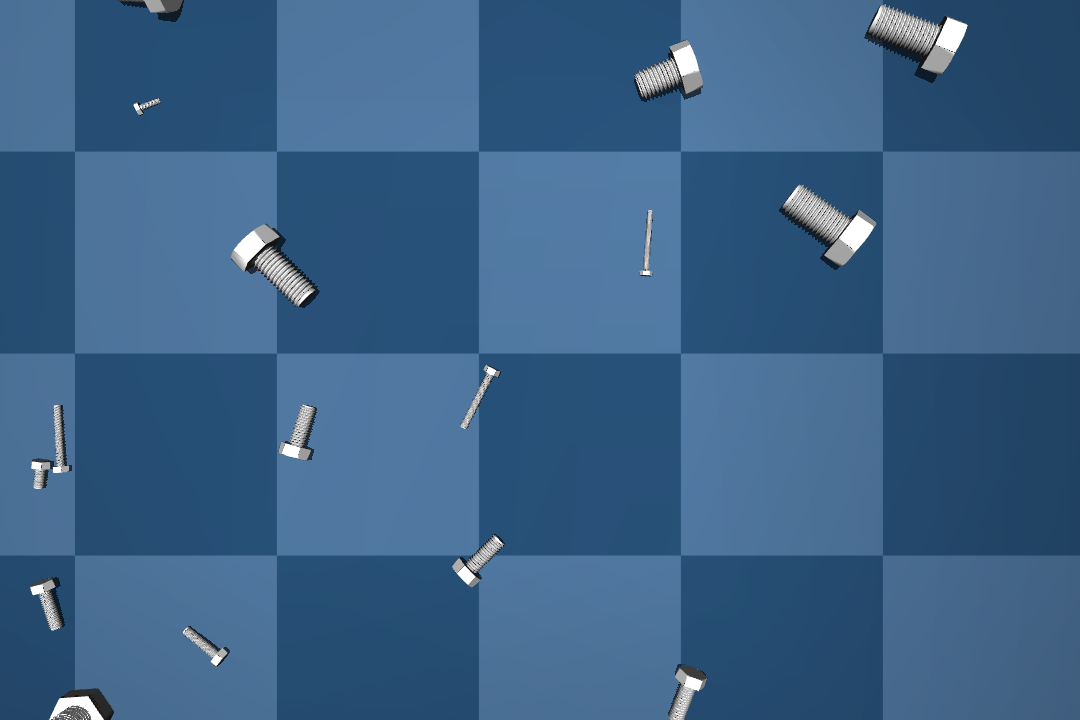

gerendertes Bild
mit allen Daten die zum Training benötigt werden
Was braucht man dafür
Daten aus dem Simulator

Evaluation der Modelle
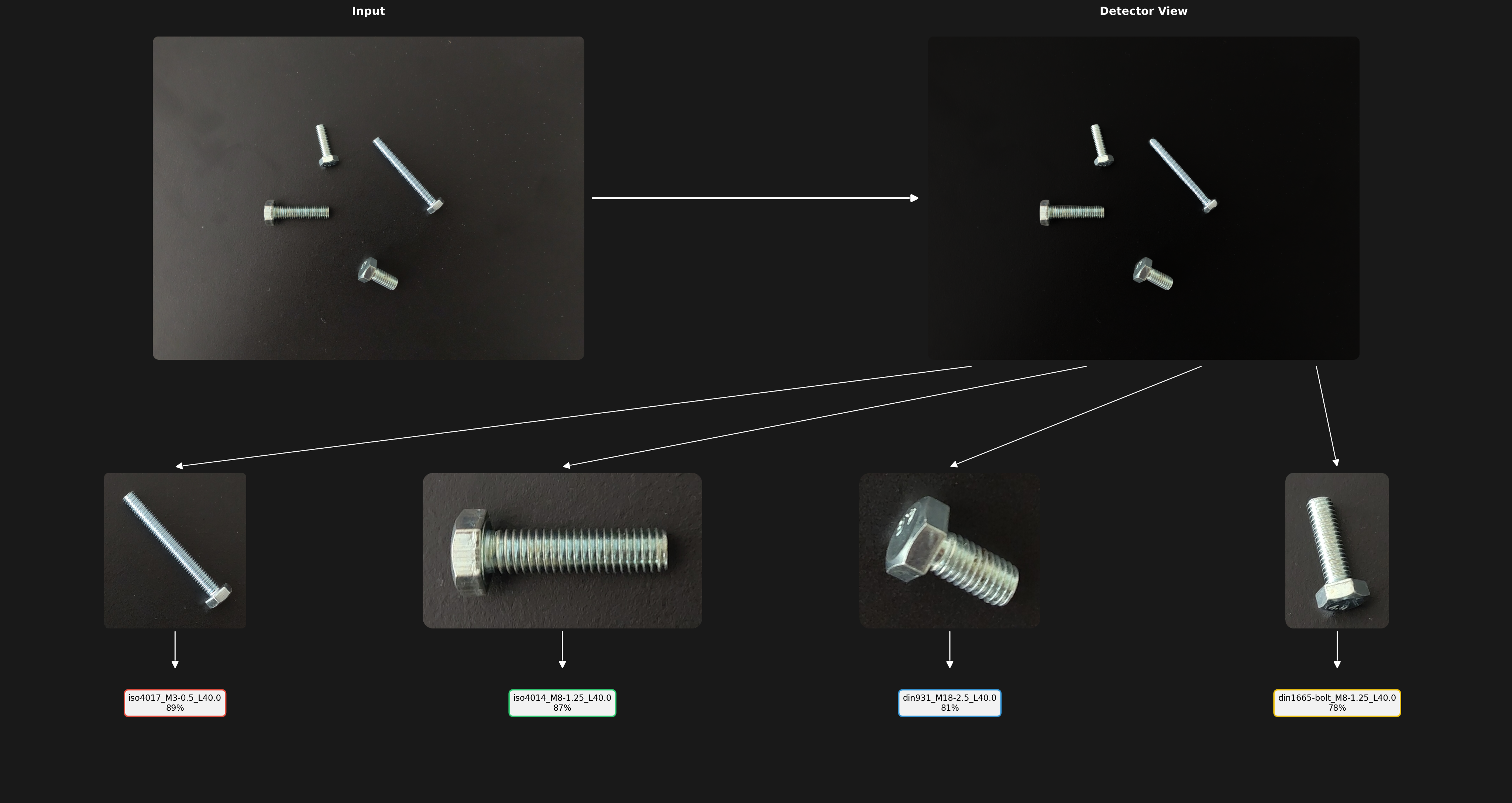
Übertragung in die Realität
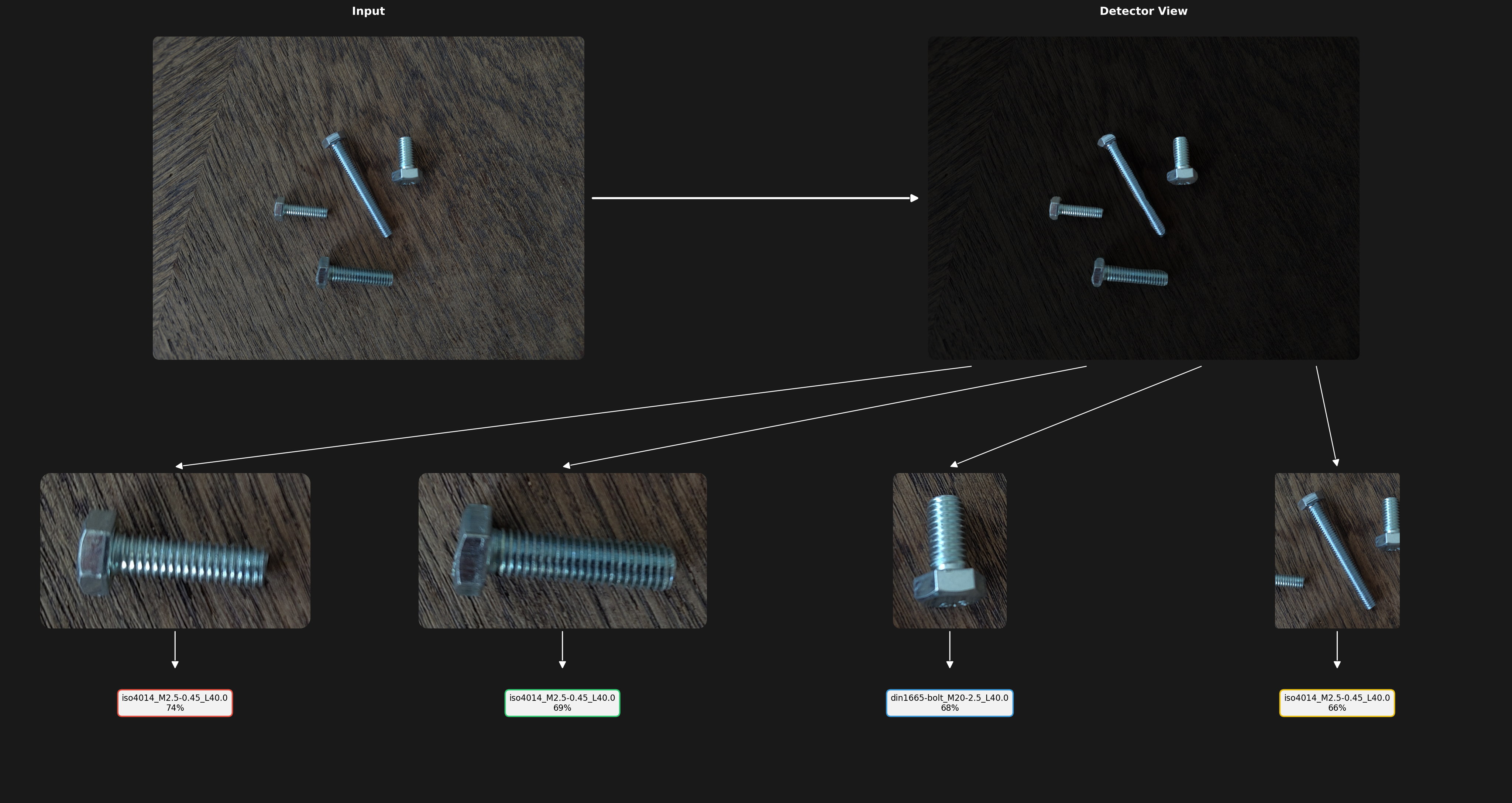
Übertragung in die Realität
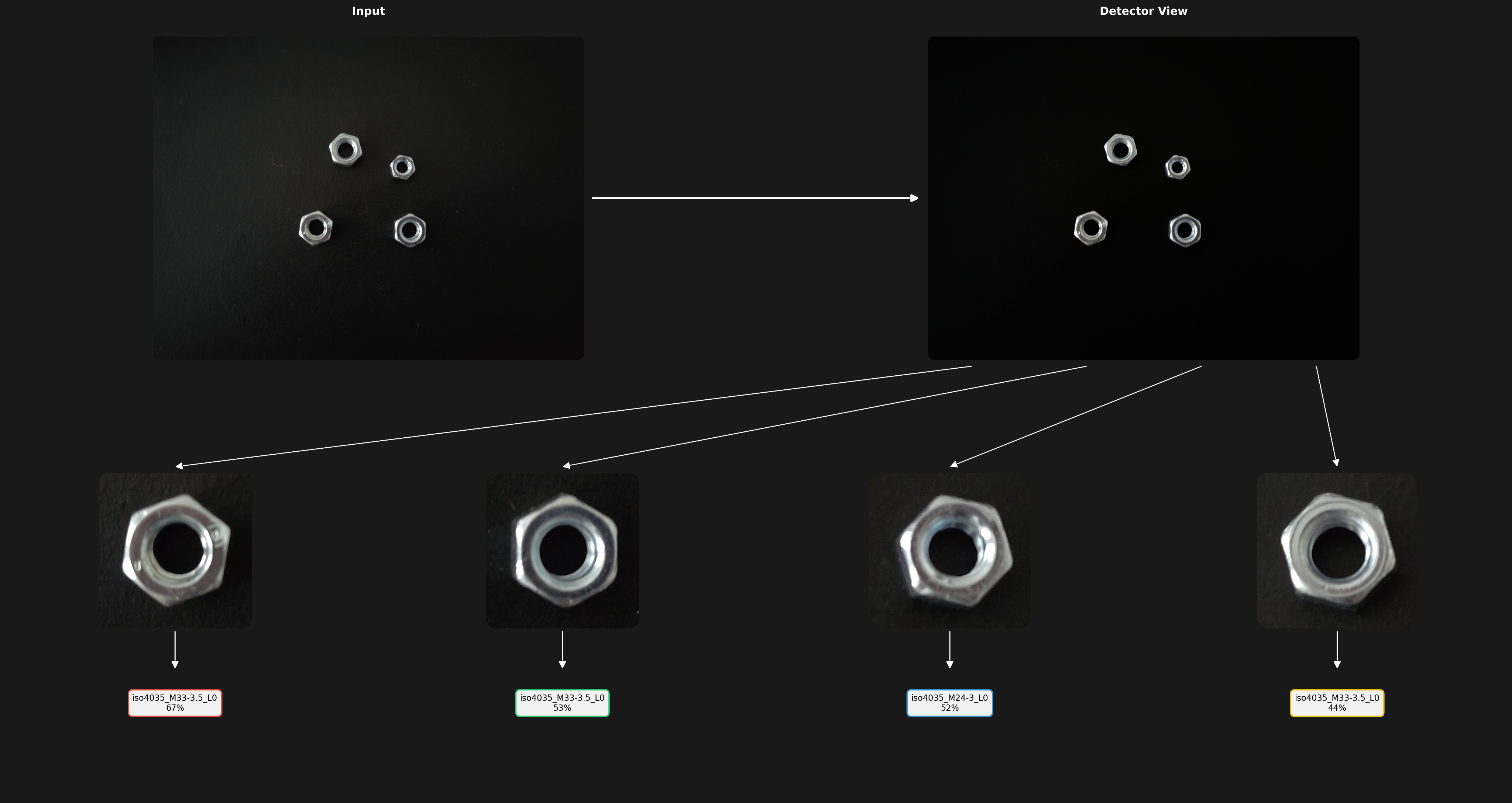
Übertragung auf andere Bauteile
Der automatisierte Inventurprozess
Work in Progress…
weitere Projekte
Reinforcement Learning Allgemein

Vergleich und Entwicklung neuer Regler
humanoide Robotik
humanoide Robotik
Entstanden in Bachelorarbeit "Implementierung eines parametrischen Gestensystems in einem 3D-gedruckten humanoiden Roboterarm", B.Eng. Valentin Kögel
Projekt HopeJr, the-robot-studio
humanoide Robotik


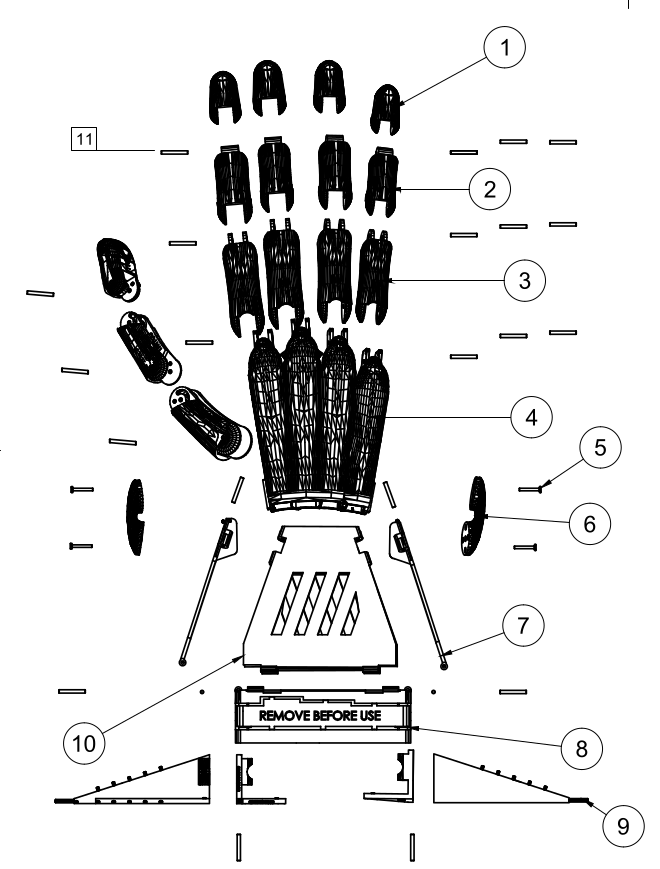
Projekt robot-nano-hand, the-robot-studio
weitere mobile Roboter
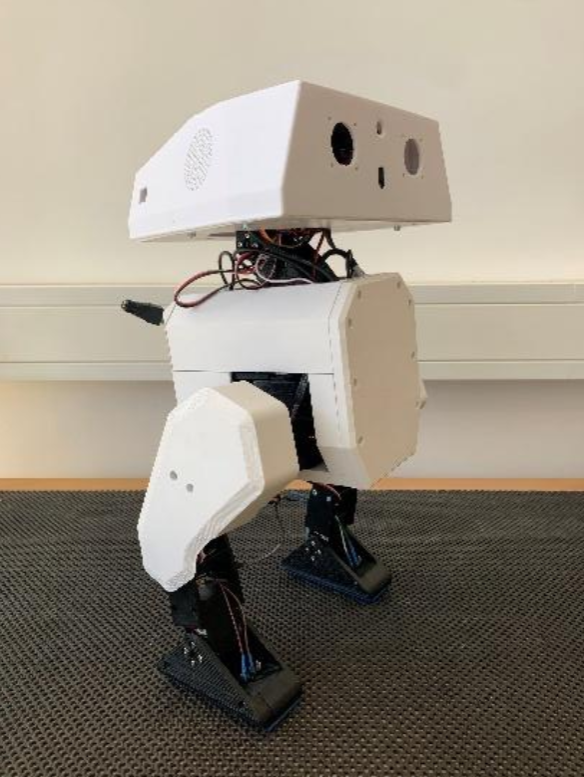

Abbildungen aus Bachelorarbeit "Konzeption und Implementierung eines Absturz- und Kollisionssicherungssystems für einen mobilen Laufroboter", Niklas Kohrmann
Projekt apirrone/Open-Duck-Mini
Taktile Sensoren
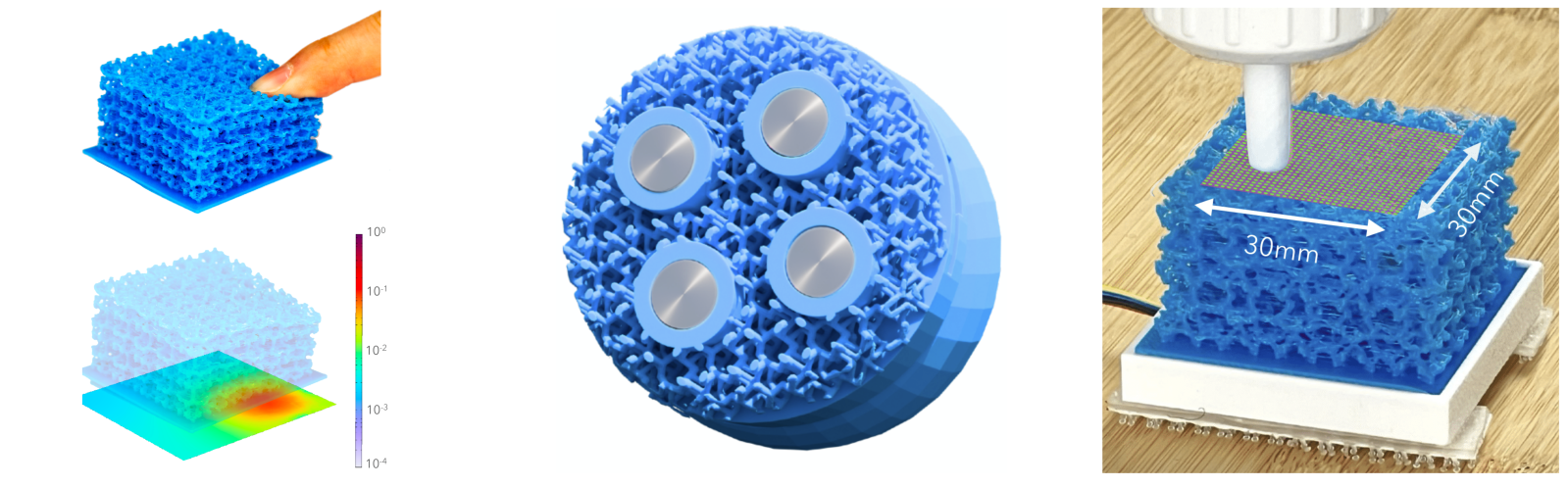
Projekt eFlesh: Highly customizable Magnetic Touch Sensing using Cut-Cell Microstructures
Venkatesh Pattabiraman and Zizhou Huang and Daniele Panozzo and Denis Zorin and Lerrel Pinto and Raunaq Bhirangi
Vielen Dank für Ihre Aufmerksamkeit
Vielen Dank für Ihre Aufmerksamkeit!
- M.Eng. Eric Plaß
- E-Mail eric.elbing@htwk-leipzig.de
- LinkedIn /in/eric-plass
- HTWK Leipzig, Fakultät Ingenieurwissenschaften
- Professur Produktions- und Logistiksysteme
- Nieper-Bau NI-107 / NI-108
![]()
![]()
![]()
Vielen Dank für Ihre Aufmerksamkeit!
- Prof. Dr. rer. nat. Martin Gürtler
- E-Mail martin.guertler@htwk-leipzig.de
- HTWK Leipzig, Fakultät Ingenieurwissenschaften
- Professur Produktions- und Logistiksysteme
![]()
![]()